Missing submersible searching Titanic site leads to a question: How do they work?
How do they communicate, and what may have gone wrong?
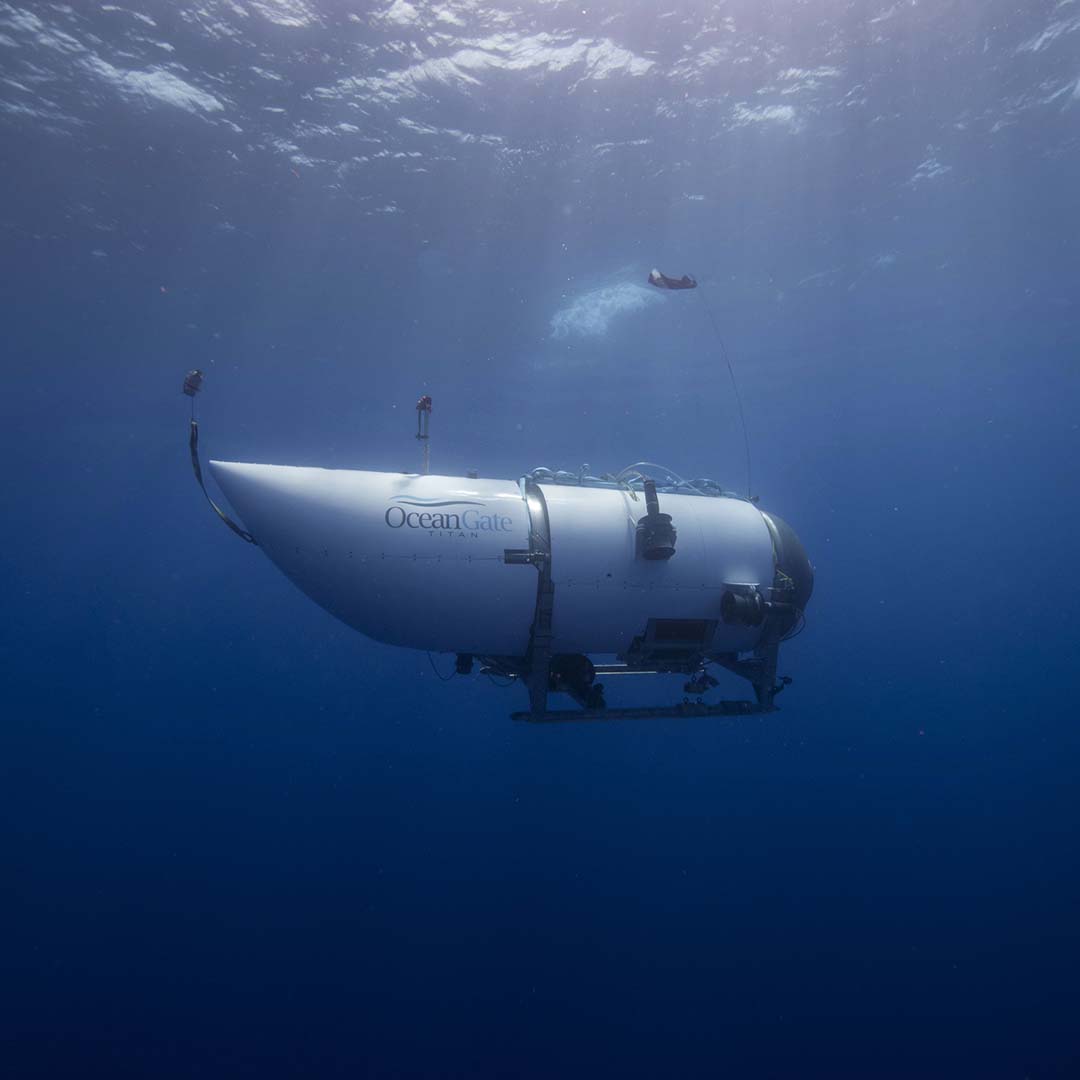
The Titan, a small submersible that went missing off the coast of Newfoundland, Canada, with five passengers Sunday. The submersible is operated by OceanGate Expeditions, a private company that offers “crewed subs for charter and scientific exploration.”
Photos courtesy of OceanGate via Instagram
An extensive search and rescue operation is underway to locate a commercial submersible that went missing during a dive to the Titanic shipwreck.
According to the US Coast Guard, contact with the submersible was lost about one hour and 45 minutes into the dive, with five people onboard. The vessel was reported overdue at 9.13pm local time on Sunday (12.13pm AEST, Monday).
The expedition was being run by US company OceanGate as part of an eight-day trip with guests paying US$250,000 per head to visit the wreck site. As of Monday afternoon (Tuesday morning in Australia), US Coast Guard Rear Admiral John Mauger said the watercraft likely had somewhere between 70 and the full 96 hours of oxygen available to the passengers.